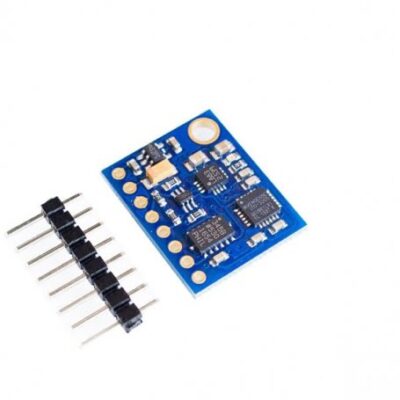
معرفی ماژول شتاب سنج 3 محوره ADXL335 GY-61:
ماژول شتابسنج ۳ محوره ADXL335 GY-61 یک ماژول الکترونیکی کوچک و سبک است که برای اندازهگیری شتاب در سه محور X، Y و Z مورد استفاده قرار میگیرد. این ماژول بر پایه سنسور ADXL335 ساخت شرکت Analog Devices طراحی شده و در بسیاری از پروژههای رباتیک، پهپادها، ابزارهای پوشیدنی، سیستمهای اندازهگیری لرزش و پایش حرکات کاربرد دارد.
کاربرد ماژول شتاب سنج 3 محوره ADXL335 GY-61:
- اندازهگیری زاویه و شیب (Tilt Sensing):با استفاده از تغییر خروجی آنالوگ در محورهای مختلف، میتوان زاویهی شیب نسبت به سطح زمین را محاسبه کرد.کاربرد در: تجهیزات صنعتی، کنترل دوربین، بازوهای رباتیک.
- ردیابی حرکت و شتاب (Motion & Acceleration Detection)مناسب برای تشخیص شروع حرکت، تغییر جهت یا توقف.کاربرد در: سیستمهای هشدار، کنترل بازیها، تشخیص سقوط (Fall Detection).
- پایش لرزش (Vibration Monitoring):امکان تشخیص لرزشهای ریز در سطوح یا ماشینآلات.کاربرد در: سیستمهای نگهداری پیشبینانه (Predictive Maintenance)، تست سازهها و تجهیزات.
- کنترل ژست و موقعیت (Gesture & Position Control):استفاده در پروژههایی مانند موس حرکتی، دستههای بازی یا رابطهای کاربری حرکتی.کاربرد در: سیستمهای واقعیت مجازی (VR)، رباتهای کنترلی.
- پهپادها و مدلهای پروازی (Drones & UAVs):برای پایدارسازی و شناسایی وضعیت پرواز.معمولاً همراه با ژیروسکوپها و مغناطیسسنجها برای ساخت IMU.
مزایا ماژول شتاب سنج 3 محوره ADXL335 GY-61:
- سه محوره (X, Y, Z):اندازهگیری شتاب در هر سه محور به صورت همزمان، مناسب برای بررسی موقعیت و حرکت در فضا.
- خروجی آنالوگ ساده:نیازی به پروتکلهای پیچیده ارتباطی (مثل I2C یا SPI) ندارد؛ به راحتی با مبدل آنالوگ به دیجیتال (ADC) در میکروکنترلرها خوانده میشود.
- مصرف توان بسیار پایین:تنها حدود 350 میکروآمپر جریان مصرف میکند، مناسب برای پروژههای باتریخور و قابل حمل.
- اندازهگیری دقیق در محدوده ±3g:مناسب برای تشخیص حرکات انسانی، لرزشهای خفیف و موقعیتسنجی دقیق.
- قابلیت تنظیم فیلتر پایینگذر (Bandwidth):امکان فیلتر کردن نویز و کنترل پاسخ فرکانسی با استفاده از خازنهای خارجی.
معایب ماژول شتاب سنج 3 محوره ADXL335 GY-61:
- خروجی آنالوگ (نیاز به ADC دقیق):برای استفاده از خروجی آنالوگ، نیاز به مبدل ADC دقیق در میکروکنترلر هست. در غیر اینصورت ممکن است نتایج ناپایدار یا نویزی دریافت شود.در مقابل، سنسورهای دیجیتال مانند MPU6050 خروجی I2C دارند که خواندن داده را سادهتر میکنند.
- عدم وجود ژیروسکوپ و مغناطیسسنج:فقط شتاب را اندازهگیری میکند، نه سرعت زاویهای یا جهتیابی مغناطیسی.در پروژههایی که به دادههای دقیقتر برای حرکت نیاز است (مثل پهپادها یا IMU کامل)، باید با سنسورهای دیگر ترکیب شود.
- محدوده اندازهگیری محدود (±3g):اگر پروژه شما شامل حرکات سریع یا ضربات شدید باشد، این ماژول ممکن است نتواند دادهها را بهدرستی ثبت کند (سنسورهایی با ±16g یا بیشتر مناسبتر هستند).
پرسشهای متداول دربارهی ماژول شتاب سنج 3 محوره ADXL335 GY-61:
- ماژول ADXL335 GY-61 چه کاری انجام میدهد؟
این ماژول شتاب را در سه محور X، Y و Z اندازهگیری میکند و از آن برای تشخیص حرکت، لرزش، زاویه یا سقوط استفاده میشود.
- چگونه ماژول را به Arduino وصل کنیم؟
تنها کافیست سه خروجی آنالوگ (X، Y، Z) را به پایههای ADC آردوینو (مانند A0، A1، A2) و پایههای VCC و GND را نیز به تغذیه و زمین متصل کنید.
- ولتاژ تغذیه مناسب برای این ماژول چیست؟
میتوانید ماژول را با 3.3 ولت یا 5 ولت تغذیه کنید، چون روی برد GY-61 رگولاتور و فیلتر ولتاژ تعبیه شده است.
- آیا خروجیها دیجیتال هستند؟
خیر. خروجیهای این سنسور آنالوگ هستند و برای خواندن آنها باید از مبدل آنالوگ به دیجیتال (ADC) استفاده کنید.
- آیا میتوان از این ماژول برای اندازهگیری زاویه استفاده کرد؟
بله، از نسبت خروجی محورهای X و Y میتوان زاویه شیب (tilt angle) را با توابع مثلثاتی مانند arctangent محاسبه کرد.













نقد و بررسیها
هنوز بررسیای ثبت نشده است.